AI for Health, Machine Learning, Neural Engineering, Robotics
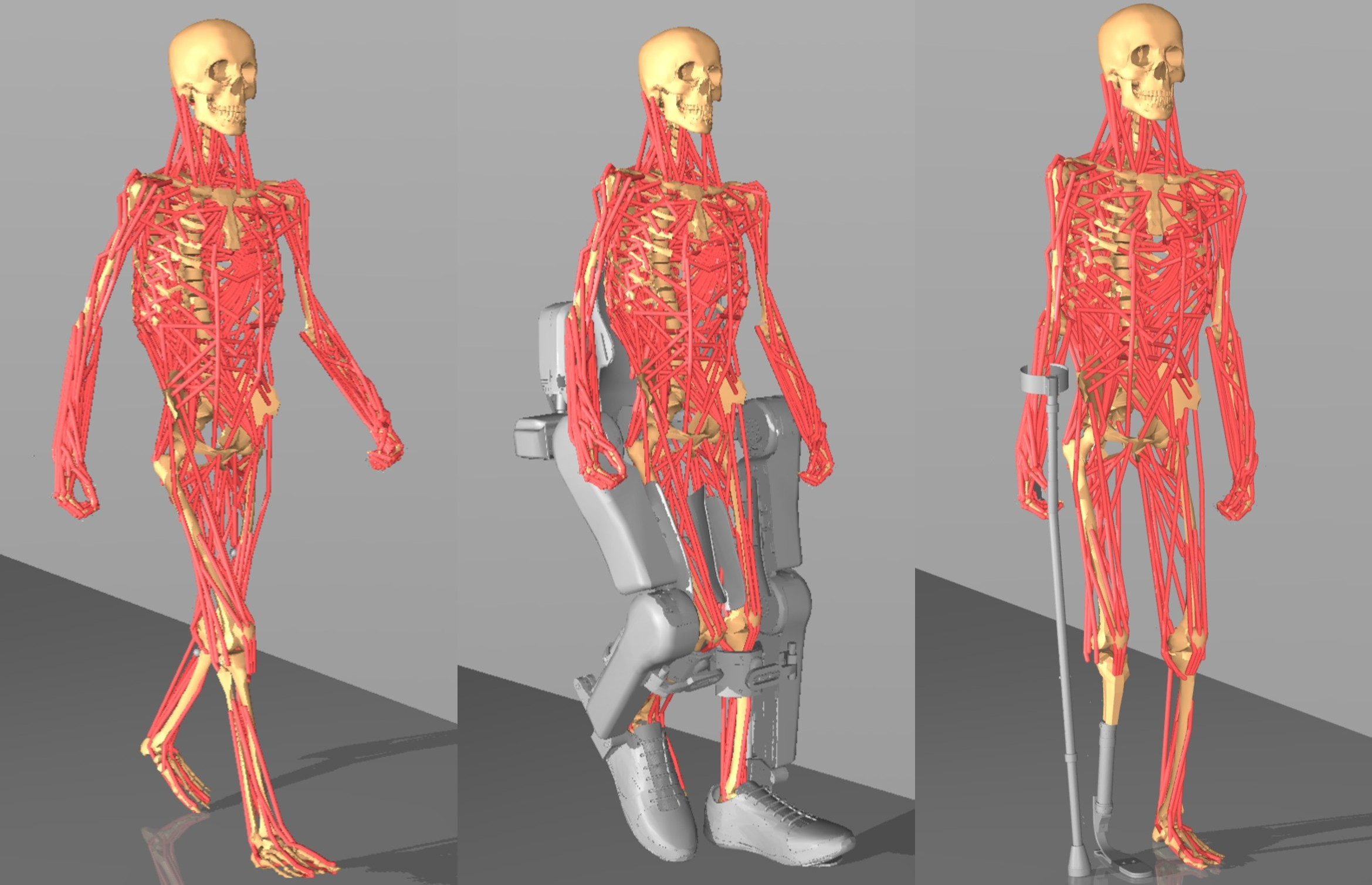
MS-Human-700
Musculoskeletal ModelNeural ControlBiomechanics
A whole-body human musculoskeletal model with 700 muscle-tendon
units, built to capture realistic human movement at full-body scale. It serves as a
biomechanically grounded platform for studying motor control and learning
controllers for human-like motion.
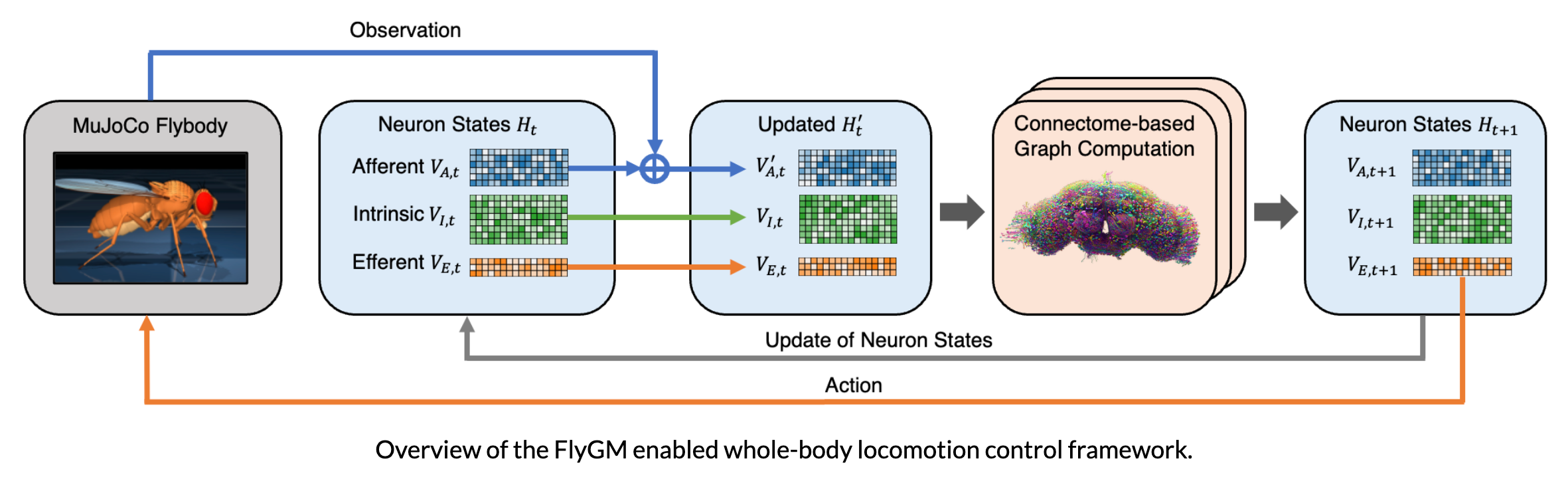
FlyGM
ConnectomicsWhole-body ControlNeural Model
A whole-brain connectomic graph model that enables whole-body
locomotion control in the fruit fly. By grounding control in the connectome, it links
biological neural circuitry to coordinated, embodied behavior.
Safe Optimization
Bayesian OptimizationSafe Learning
Efficient black-box optimization under safety constraints, where
unsafe evaluations must be avoided throughout the search. The methods balance
exploration and constraint satisfaction so that performance improves without violating
safety requirements.
Preference-based Optimization
Bayesian OptimizationPreference Learning
Optimization driven by preference feedback rather than explicit
numerical objectives, where users compare candidates instead of scoring them. This makes
it well suited to tuning systems whose quality is hard to quantify but easy to judge.
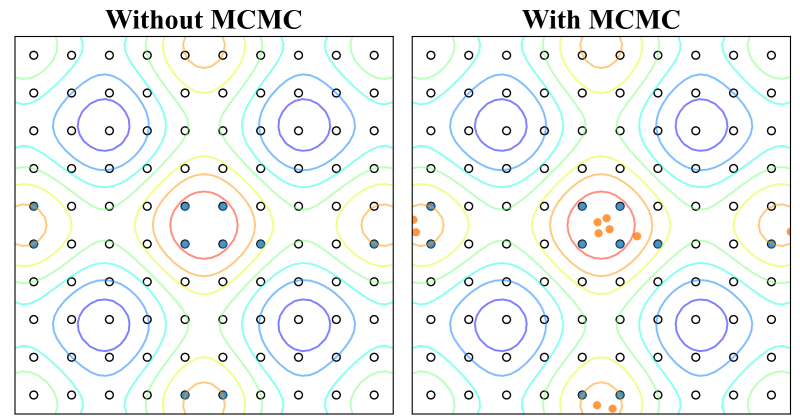
High-dimensional Optimization
Bayesian OptimizationHigh-dimensional
Scalable optimization methods for high-dimensional problems, where
classical Bayesian optimization struggles. The work develops techniques that remain
sample-efficient as the search space grows.
A personalized gait optimization framework for lower-body
exoskeletons that learns from human feedback. It adapts assistance to each user's
preferences, improving comfort and walking performance during interaction.
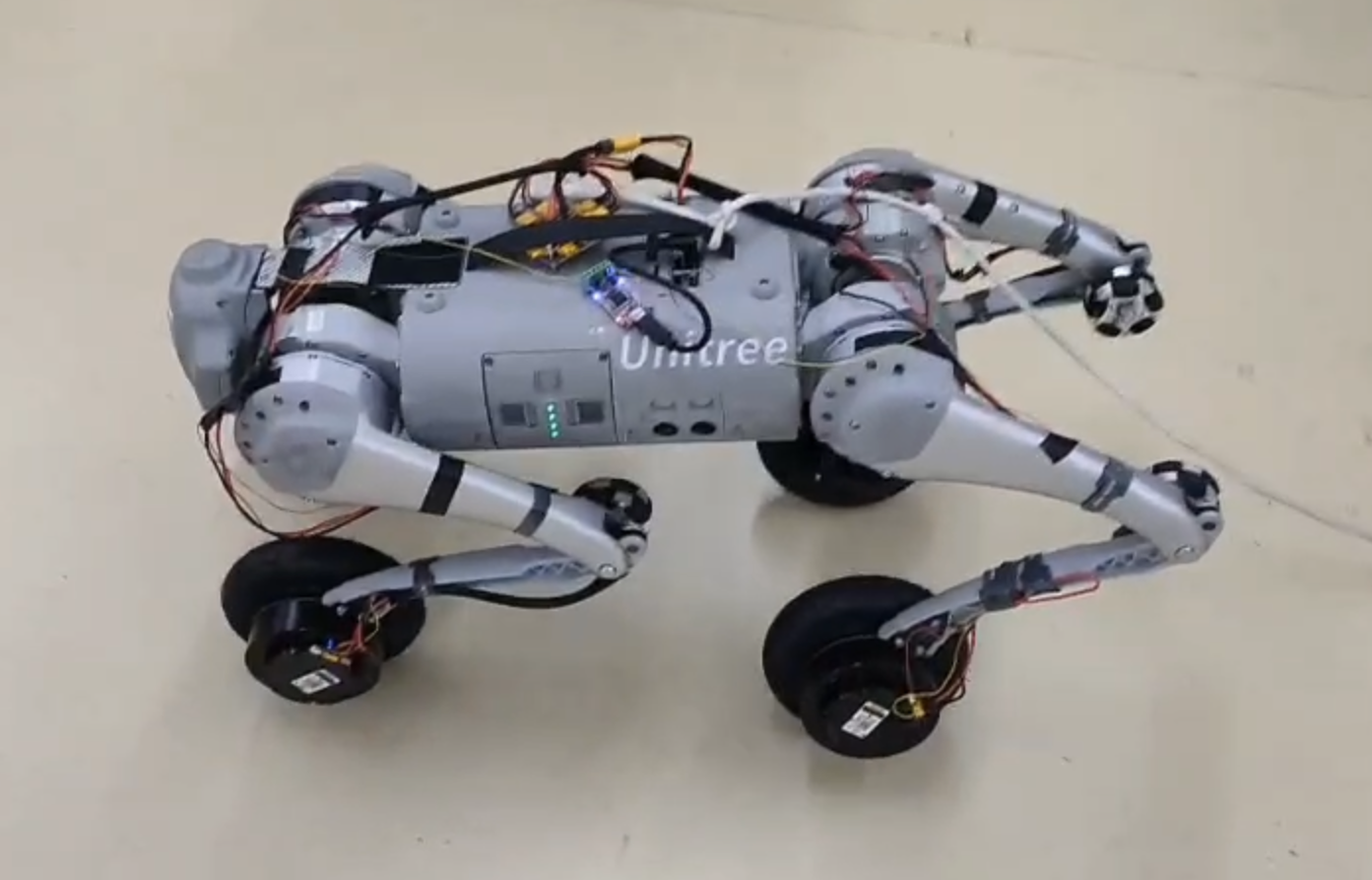
Wheeled-legged Quadruped
Reinforcement LearningLegged RoboticsLocomotion
Learning adaptive locomotion for wheeled-legged quadrupeds that
combine wheels and legs for versatile movement. The controllers switch between rolling
and stepping to traverse varied terrain efficiently.