
Research Topics
We work on neuro-musculo-skeletal modeling and reinforcement learning for human motion control and interactive robotics.
Related areas
AI for Health, Machine Learning, Neural Engineering, Robotics
Neuro-Musculo-Skeletal Modeling
Optimization and Control Methods
Interactive Robotics

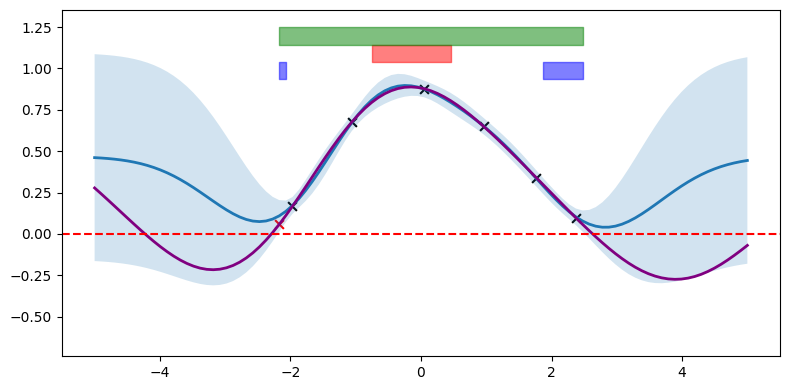
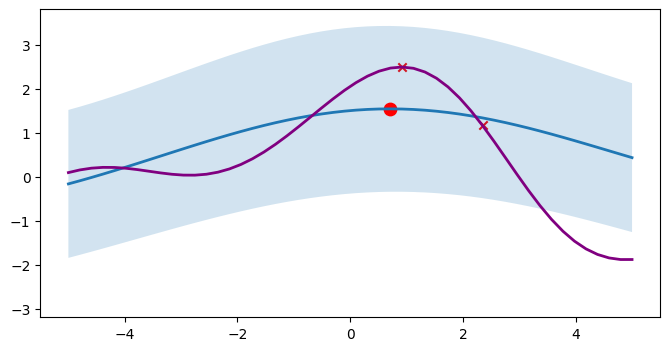
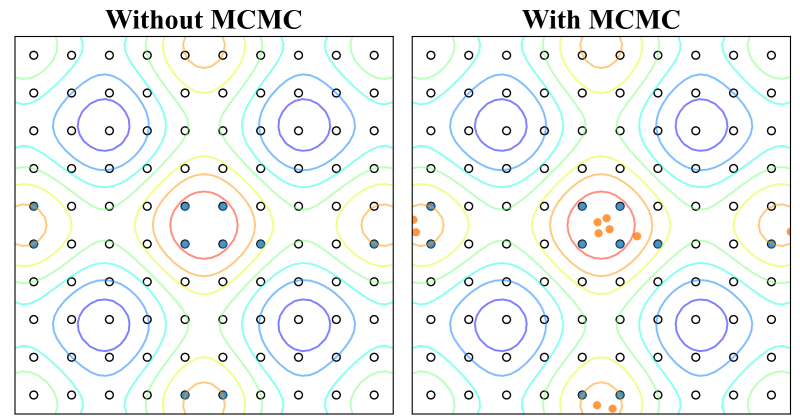
Preference-based Learning
A personalized gait optimization framework for lower-body exoskeleton.

Human-machine Interaction
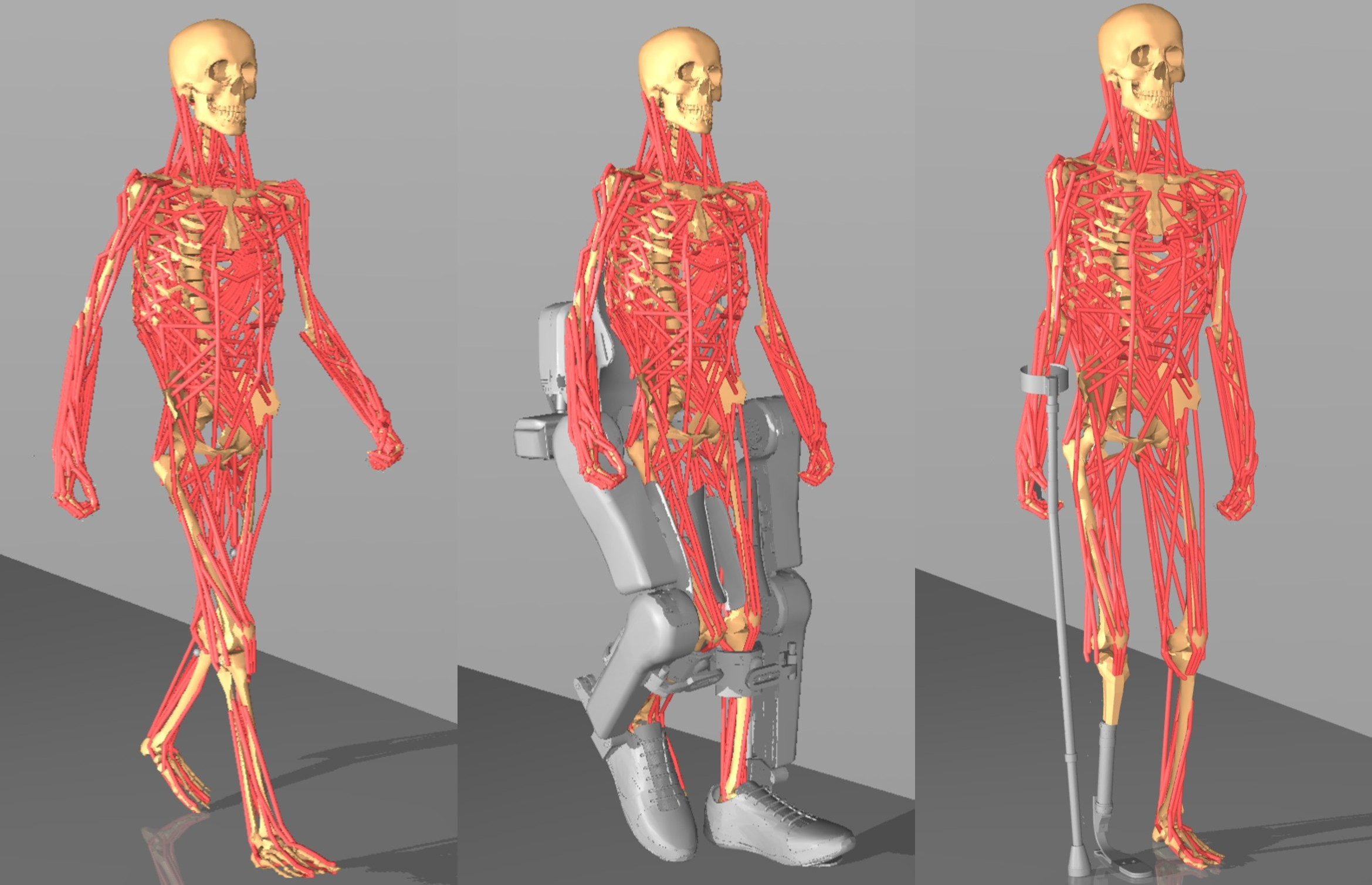
Based on the existing model, build a full-body human musculoskeletal model. This model can interact with other machines, such as Exoskeleton, Cruth, and so on.
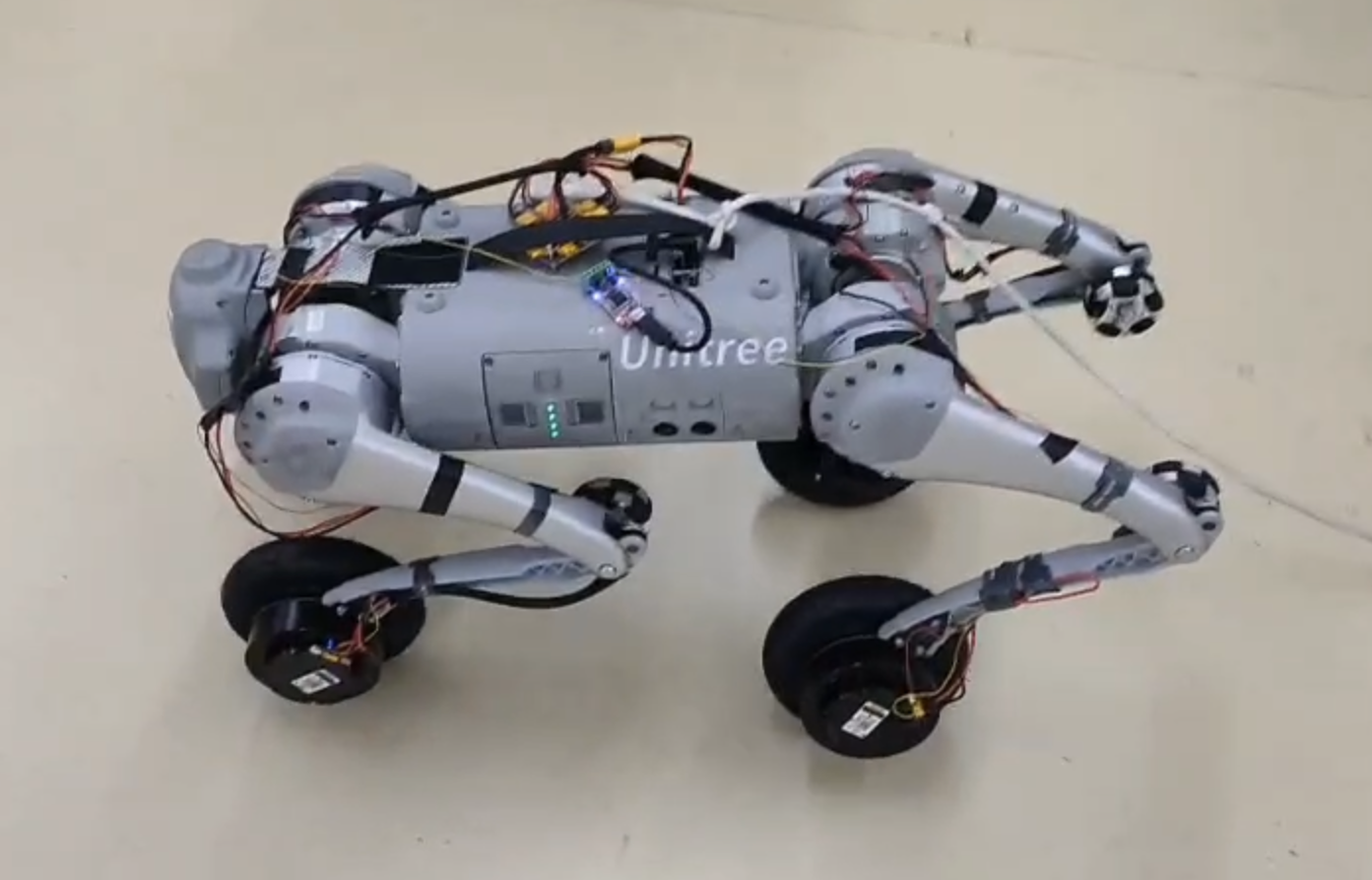
Wheeled-legged Quadruped
Learning adaptive locomotion for wheeled-legged quadrupeds.